
Work with a phrase
Phrases are a string of words that outline the various ways in which a topic can be expressed. That is, they represent the type of interactions you want to find and analyze and subsequently enable you to focus your business on what your customers want and need.
Phrases can be added one by one, or in bulk using a file upload option. Any words, including words outside of the standard dictionary can be included in a phrase and are subsequently automatically added to the language model for recognition. Without one or more phrases a topic can not exist. For more information, see Work with a topic.
For information about determining the optimal strictness for a phrase, see How do I choose appropriate strictness values when entering a topic phrase?
Note:
- A topic is made up of one or more phrases that represent a specific intent (for example, cancellation) and each program is associated with one or more topics.
- Each topic is limited to 1000 of phrases.
- Phrases can be added one by one, or in bulk using the import phrases option.
- More than one topic can contain the same phrase.
The more words and phrases you add to a topic, the higher the likelihood that those words and phrases will be transcribed in transcripts. If your organization has words that are outside of the standard vocabulary, be sure to include those words in many phrases. Doing so will automatically adapt the language model and adjust transcription output.
If adding an acronym to a phrase, the acronym must be spelled out as individual letters. For example, add “roth I R A” to detect and transcribe discussions about “roth IRA”s more frequently and accurately.
- Click Admin > Quality.
- Click Topics. A list of all of the available topics is displayed.
- Create a new topic or edit an existing topic. For more information, see Work with a topic.
- Click the Phrases (#) tab at the top of the topics list. The Phrase list appears.
Click the image to enlarge.
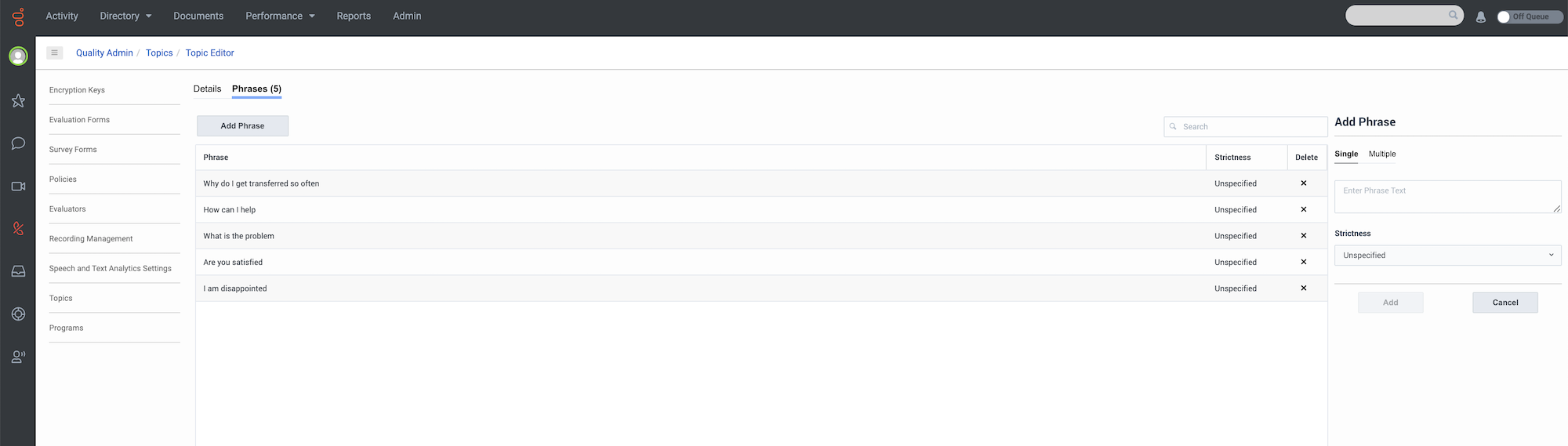
The following information and options appear in the Phrases list:
-
- Phrase – The Phrase column contains the phrase.
- Strictness – Indicates how strict the matching algorithm is when matching phrases in a transcript. The matching algorithm looks at phrase confidence after stemming to determine if the phrase is a match. For additional details, refer to the following definitions:
- Phrase confidence – A score between 0 and 100 generated by speech and text analytics during phrase matching that depends on word order and any missing or substituted words within the transcript.
- Stemming – The process of transforming a word to the base root of that specific word. As a result, different tenses or plurals of a specific word are considered a match (for example, when the root word is cancel, then canceled, cancels, and cancelling considered a match).
- Delete – Enables you to delete the specific phrase. To delete the phrase click the x associated with the phrase you want to delete.
- Search – Use the Search field to find a specific phrase.
- Make a list of phrases that you believe represent your business issue.
- Adhere to the following best practices during this process.
- Business Problem – Before you begin listing phrases, define the data you want to collect in 3-4 sentences. Think about the intent that the phrases you are collecting should reflect, and be as specific as possible.
- Terms – List as many common phrases as you can that are frequently used to express the intent. Include as many variations of the phrases as you can.
- Term Length – Longer phrases are easier to identify than shorter phrases, so try to use phrases that include at least 4-6 words and at least 20 characters. Phrases can contain up to 100 characters. As a rule, the longer the phrase, the more accurately it will be identified. However, fewer events are found for longer phrases. Conversely, the shorter the phrase, the more events will be found, but the accuracy will be lower.
- Synonyms – Try to think of synonyms for words that appear in the phrases, and list variations of the phrases by using the synonyms in place of the original word. For example, if you are looking for conversations in which closing an account is discussed, list all words with the verbs “cancel” and “close”:
- want to cancel my account
- want to close my account
- need to close my account
- need to cancel my account
- Short Words – Remove short words from the beginnings of phrases whenever possible. For example, instead of “I want to reduce the rate,” use “want to reduce the rate.”
- Click Admin > Quality.
- Click Topics. A list of all of the available topics is displayed. For more information, see Work with a topic.
- From the Name column, click the name of the topic to which you want to add, update, and/or remove a phrase or click Create Topic if you are adding phrases to a new topic. The selected topic details are displayed.
- Click the Phrases (#) tab at the top of the topics list. The Phrase list appears.
- Click Add Phrase at the top of the Phrase list. The Add Phrase options appear in the right side of the screen.
Note: It is possible to include words with quotation marks within a phrase, doing so means that the words within the quotation marks are mandatory and will need to be included as an exact match in order for the phrase to be detected. This means, phrase order is important and stemming does not occur . For example, if the word cancel is in quotation marks, the system will not search for the words cancelled, cancelling, cancels, and so on. It will only look for the word cancel. When a phrase includes a word or words in quotation marks, the word(s) in quotation marks will appear as bold in the Phrase list. When the process searches for the words in the phrase, Topic spotting will not use any additional white space added to the phrase. Any additional white space will be stripped from the phrase when it is added.
Click the image to enlarge.

- Add a single phrase:
- Under the Add Phrase title click the Single tab.
- In the Enter Phrase Text field enter the phrase you want to add to the topic.
- From the Strictness list select a strictness.
The level of strictness defines how confident the system must be to recognize a topic phrase. For example, if you select Low (65) for a phrase or topic, the topic phrase must be identified with confidence levels of at least 65 to be identified. That is, if the system recognizes a phrase with a confidence of 55 and the topic was configured with a strictness of Low (65), then it will be marked as not found and not associated against the topic for that interaction. However, if the strictness returned by the system is higher than 65, then it will be marked as found and associated with that topic for that interaction. - Click Add to add the new phrase to the phrase list.
- Add multiple phrases:
- Under the Add Phrase title click the Multiple tab.
- Click Browse and select the .txt file containing the phrases you want to add to the topic.
- Click Add to add the new phrases to the phrase list.
- Add a single phrase:
- Click Save Draft to create the new topic or to update an existing topic. A Topic successfully updated as draft message appears in the top right corner of the screen.
- Click Close to return to the topics list.
- Make a list of phrases that you want to change.
- Adhere to the following best practices during this process.
- Business Problem – Before you begin listing phrases, define the data you want to collect in 3-4 sentences. Think about the intent that the phrases you are collecting should reflect, and be as specific as possible.
- Terms – List as many common phrases as you can that are frequently used to express the intent. Include as many variations of the phrases as you can.
- Term Length – Longer phrases are easier to identify than shorter phrases, so try to use phrases that include at least 4-6 words and at least 20 characters. Phrases can contain up to 100 characters. As a rule, the longer the phrase, the more accurately it will be identified. However, fewer events are found for longer phrases. Conversely, the shorter the phrase, the more events will be found, but the accuracy will be lower.
- Synonyms – Try to think of synonyms for words that appear in the phrases, and list variations of the phrases by using the synonyms in place of the original word. For example, if you are looking for conversations in which closing an account is discussed, list all words with the verbs “cancel” and “close”:
- “want to cancel my account”
- “want to close my account”
- “need to close my account”
- “need to cancel my account”
- Short Words – Remove short words from the beginnings of phrases whenever possible. For example, instead of “I want to reduce the rate,” use “want to reduce the rate.”
- Click Admin > Quality.
- Click Topics. A list of all of the available topics is displayed. For more information, see Work with a topic.
- From the Name column, click the name of the topic whose phrases you want to change. The selected topic details are displayed.
- Click the Phrases (#) tab at the top of the topics list. The Phrase list appears.
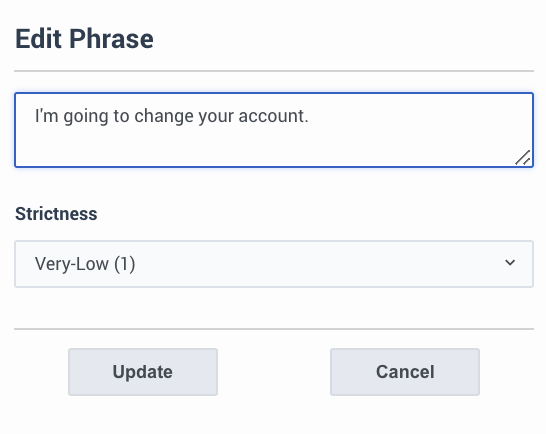
- From the Phrase list click the phrase you want to change. The Edit Phrase options appear in the right side of the screen.
Note: It is possible to include words with quotation marks within a phrase, doing so means that the words within the quotation marks are mandatory and will need to be included as an exact match in order for the phrase to be detected. This means, phrase order is important and stemming does not occur . For example, if the word cancel is in quotation marks, the system will not search for the words cancelled, cancelling, cancels, and so on. It will only look for the word cancel. When a phrase includes a word or words in quotation marks, the word(s) in quotation marks will appear as bold in the Phrase list. When the process searches for the words in the phrase, Topic spotting will not use any additional white space added to the phrase. Any additional white space will be stripped from the phrase when it is added. - From the field provided change the phrase.
- From the Strictness list select a different strictness or keep the current strictness.
The level of strictness defines how confident the system must be to recognize a topic phrase. For example, if you select Low (65) for a phrase or topic, the topic phrase must be identified with confidence levels of at least 65 to be identified. That is, if the system recognizes a phrase with a confidence of 55 and the topic was configured with a strictness of Low (65), then it will be marked as not found and not associated against the topic for that interaction. However, if the strictness returned by the system is higher than 65, then it will be marked as found and associated with that topic for that interaction. - Click Update to update the phrase in the Phrase list.
Click the image to enlarge.
- Click Save to update the existing topic with the updated phrase. A Topic successfully updated as draft message appears in the top right corner of the screen.
- Click Close to return to the topics list.
- Click Admin > Quality.
- Click Topics. A list of all of the available topics is displayed. For more information, see Work with a topic.
- From the Name column, click the name of the topic whose phrase you want to delete. The selected topic details are displayed.
- Click the Phrases (#) tab at the top of the topics list. The Phrase list appears.
- From the Delete column click the click the x associated with the phrase you want to delete.
- Click Save Draft to update the existing topic. A Topic successfully updated as draft message appears in the top right corner of the screen.
- Click Close to return to the topics list.